铁四院荣获3项质量技术奖
日前,在2024年度中国质量协会质量技术奖(项目奖)评选活动中,铁四院牵头申报的3个项目获奖。
质量技术奖是2005年经科技部、国家科技奖励办公室批准设立的科学技术类奖项,表彰在质量技术进步活动中做出突出贡献的个人和组织,是我国质量技术领域的最高奖。该奖项每年评比一次,总授奖项目数量不超过当年受理项目总数的30%。
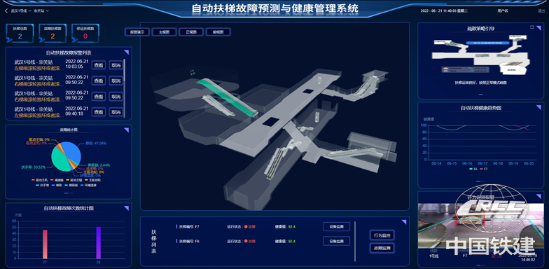
基于多维监测的自动扶梯智能健康管理及故障预警系统(铁四院 供图)
依托国家重点研发计划《城市地下基础设施运行综合监测关键技术研究与示范》等课题,“基于多维监测的自动扶梯智能健康管理及故障预警系统”立足30多个城市、80余条轨道交通线路、100个事故案例数据进行整理分析,进行关键技术研究,采用多维度监测数据,融合故障知识库深度学习的收敛算法,建立了多维度健康管理系统,攻克了从故障修到预防修的难题,实现设备健康评测和预防性维修,预警可靠度达96%,维保人次降低22%以上,维保费节省20%以上;研发的复杂场景下基于关节点的行为识别及预判算法,实现1s内超20人的行为精准识别,准确率≥92%;研发了提升设备运行模式与旅客行为智慧联动技术,实现10种以上不同的运行模式与运营场景匹配,填补了车站自动扶梯系统乘客行为安全保障技术空白。
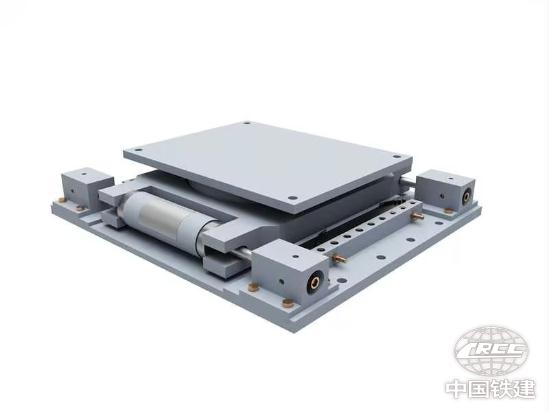
铁路桥梁多功能弹性约束装置研发及应用(铁四院 供图)
高速铁路技术标准高、平面曲线半径大,线路与道路、铁路、河流小角度交叉频繁,需建设大量跨度120~200米的大跨梁桥。当混凝土桥温度联长大于200米时,传统方法是在梁端将无缝钢轨断开、设置钢轨伸缩调节器,以消除钢轨内过高的温度应力。伸缩调节器存在行车不平顺、养护工作量大、造价高,且曲线、大纵坡路段无法设置,进而影响车站接线和线路局部走向。铁路桥梁多功能弹性约束装置的研发和应用,成功解决必须在大跨桥梁端部设置钢轨伸缩调节器这一重大技术难题,对推动铁路高质量建设,具有重要意义。

无人驾驶城市轨道交通行车空间安全自感知关键技术研究及应用(铁四院 供图)
无人驾驶轨道交通具有更安全、更高效、更节能的优点,但仍面临钻机打穿隧道、轨旁设备失稳掉落、区间线缆缓变脱落等突发障碍物侵入行车空间引发碰撞的安全挑战。传统列车采用的被动接触式障碍物检测装置无法事前感知并避免碰撞,亟需研究由列车自主对行车空间内突发障碍物进行实时精准感知、风险评估与超前防控的技术及装备。项目依托我国无人驾驶轨道交通工程建设,开展了行车空间实时感知与安全预防的基础理论研究、关键技术攻关、高端装备研发,实现重大创新。成果获得由国际电工委员会(IEC)颁发的无人驾驶列车主动感知领域全球首个最高级别(SIL4)安全认证,保障超24.3亿人次/年安全绿色出行。成果直接应用于北京、上海、武汉、苏州、香港等8个城市的无人驾驶轨道交通工程。
【编辑:敏业】
相关新闻
- 2024-07-30铁四院编制的4项行业标准发布
- 2024-06-11铁四院刷新两项行业纪录
- 2024-04-18铁四院主编两项国家标准正式发布
- 2024-01-19铁四院联合起草的国际标准发布